
Робот
Периферийное оборудование
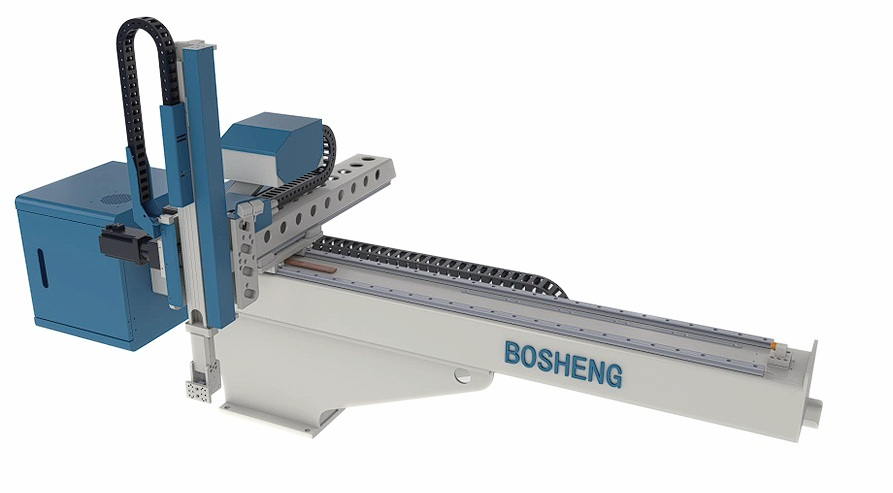
Робот – это устройство автоматизации процесса литья пластмасс под давлением на инжекционно-литьевой машине (термопластавтомате). Устанавливают роботы непосредственно на машине или рядом с ней (в зависимости от размера), и основная их функция состоит в том, чтобы автоматизировать процесс производства: вынимать пластиковые изделия из пресс-форм. При этом их использование позволяет значительно ускорить производственный цикл, сократить издержки, повысить производительность.
Управление роботом производится специальной программой, от которой они получают команды (например, снимать изделия с машины или выполнять другие функции).
В стандартном исполнении конструкция роботов для ТПА содержит:
- две (три, пять) сервооси для быстрого ускорения и высоких линейных скоростей
- две поворотных пневмооси
- от 1 до 6 вакуумных и (или) напорных контуров
- три типа привода на выбор: сервопривод (для динамичного цикла), асинхронный и цифровой (для сверхбыстрого извлечения деталей за 0,5 секунды)
Оси робота
- Ось Z – основная ось робота, которая расположена перпендикулярно оси термопластавтомата. Как правило, служит для переноса изделия из области пресс-формы на конвейер или рабочий стол или к следующей операции. Именно эта ось крепится к неподвижной плите или устанавливается на опоры, в нее вмонтирована система управления.
- Ось Y – вертикальная ось, основное требование — хода этой оси должно быть достаточно для выгрузки изделия. Если ход небольшой, то высота выгрузки изделия будет высокой (например, понадобится очень высокий конвейер).
- Ось X – обычно расположена вдоль оси ТПА, служит для передвижения каретки робота в области пресс-формы.
- Ось С – входит в стандартную поставку, при стандартном расположении вращает захват в плоскости параллельной оси ТПА. Обычно служит для съема изделия и поворота захвата на 90 градусов для укладки изделия на конвейер или рабочий стол.
- Ось В – для поворота захвата, например, от подвижной к неподвижной плите.
- Ось А – при стандартном расположении робота вращает изделие в плоскости пресс-формы.
- Дополнительные оси (для управления захватом).
При стандартном расположении робота подразумевают такое расположение, когда ось Z расположена перпендикулярно оси термопластавтомата.
Использование в производственном процессе робота весьма эффективно.